
¶ Estado: Activo
¶ 2023-06-06
Convertido en Walknail, 3s motores 1404 y AIO AT32
¶ 2022-04-10
Revivido despues de su picinazo con el Stack del AcroCrap.
¶ Frame and Parts
- BQE Rip Squeak V2
- HGLRC Aeolus 1404 4800 kv
- NeutronRC AT32F435 Mini AIO 35Amp
- WalkSnail mini 1S
- ExpressLRS HM EP1
- HQ PRop 3028
¶ Peso
- Sin Bateria: TBD
- Con Bateria 3s: TBD
¶ 3D Printed Parts
Feets and parts
ELRS antenna mount
¶ SW
¶ Versions
Betaflight 4.3.2
AM32 - AT32DEV - AM32, 2.0.1, Bootloader v4 (PB4), MCU: F421
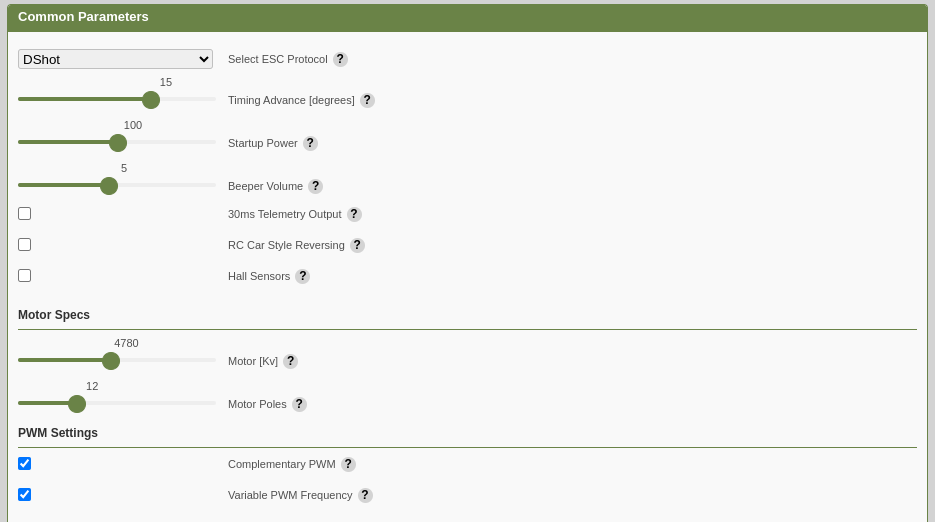
¶ AM32 Config

¶ Diff all
¶ 2023-07-19
#
# diff all
###WARNING: NO CUSTOM DEFAULTS FOUND###
# version
# Betaflight / NEUTRONRCF435MINI (NERC) 4.3.2 Jun 7 2023 / 15:35:10 (efc7b28) MSP API: 1.44
# NO CUSTOM DEFAULTS FOUND
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name NEUTRONRCF435MINI
mcu_id 20146112542500080d18071d
signature
# name: RedSqueak
# feature
feature -SOFTSERIAL
feature -LED_STRIP
# serial
serial 1 1 115200 57600 0 115200
# beeper
beeper -ON_USB
# beacon
beacon RX_LOST
beacon RX_SET
# aux
aux 0 0 0 1700 2100 0 0
aux 1 13 1 1700 2100 0 0
aux 2 35 2 1700 2100 0 0
aux 3 36 0 900 900 0 13
# master
set gyro_lpf1_static_hz = 375
set gyro_lpf2_static_hz = 750
set dyn_notch_count = 2
set dyn_notch_min_hz = 125
set dyn_notch_max_hz = 850
set gyro_lpf1_dyn_min_hz = 375
set gyro_lpf1_dyn_max_hz = 750
set smith_predict_delay = 21
set acc_hardware = NONE
set acc_calibration = 24,6,-13,1
set mag_hardware = NONE
set baro_hardware = NONE
set rc_smoothing_auto_factor = 140
set rc_smoothing_setpoint_cutoff = 25
set rc_smoothing_feedforward_cutoff = 25
set serialrx_provider = CRSF
set blackbox_sample_rate = 1/2
set blackbox_device = NONE
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set align_board_yaw = -45
set ibata_scale = 100
set yaw_motors_reversed = ON
set small_angle = 180
set simplified_gyro_filter_multiplier = 150
set report_cell_voltage = ON
set osd_vbat_pos = 428
set osd_rssi_pos = 3147
set osd_link_quality_pos = 3083
set osd_link_tx_power_pos = 3115
set osd_rssi_dbm_pos = 3179
set osd_tim_2_pos = 3563
set osd_flymode_pos = 20
set osd_current_pos = 355
set osd_craft_name_pos = 2599
set osd_gps_sats_pos = 33
set osd_home_dir_pos = 47
set osd_home_dist_pos = 83
set osd_warnings_pos = 14646
set osd_avg_cell_voltage_pos = 3595
set osd_displayport_device = MSP
set debug_mode = GYRO_SCALED
set vcd_video_system =
###ERROR IN diff: CORRUPTED CONFIG: vcd_video_system = 3###
set displayport_msp_serial = 1
set gyro_1_sensor_align = CW0
set gyro_1_align_yaw = 0
set rpm_filter_harmonics = 2
set name = RedSqueak
profile 0
# profile 0
set dterm_lpf1_dyn_min_hz = 90
set dterm_lpf1_dyn_max_hz = 180
set dterm_lpf1_static_hz = 90
set dterm_lpf2_static_hz = 180
set anti_gravity_gain = 5000
set yaw_lowpass_hz = 0
set p_pitch = 70
set i_pitch = 126
set d_pitch = 45
set f_pitch = 187
set p_roll = 67
set i_roll = 120
set f_roll = 180
set p_yaw = 67
set i_yaw = 120
set f_yaw = 180
set d_min_roll = 40
set d_min_pitch = 45
set feedforward_averaging = 2_POINT
set feedforward_smooth_factor = 45
set feedforward_jitter_factor = 10
set dyn_idle_min_rpm = 35
set simplified_master_multiplier = 150
set simplified_d_gain = 90
set simplified_dmax_gain = 0
set simplified_dterm_filter_multiplier = 120
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 85
rateprofile 1
# rateprofile 1
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 85
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 1
# save configuration
save
#