
¶ Estado: Dead
falta FC y un motor. Don sus partes para revivir el RedSqueak despues de su piscinaso.
¶ Frame and Parts
-
HSKRC Acrobot (Acrobrat Banggod Clone)
-
Emax ECO 1407 4100 kv
-
E7082VM VTX - Sin OpenVTX (rompi los pads para flashear el FW)
-
Foxeer Razer Micro
-
ExpressLRS HM EP1
-
T-Motor T3140 o Gemfan 3052
¶ Peso
- Sin Bateria: 172gr
- Con Bateria: 269gr
¶ 3D Printed Parts
¶ SW
¶ Versions
Betaflight 4.3 RC3
BlueJay 0.16 - 48 KHz PWM
¶ Profile
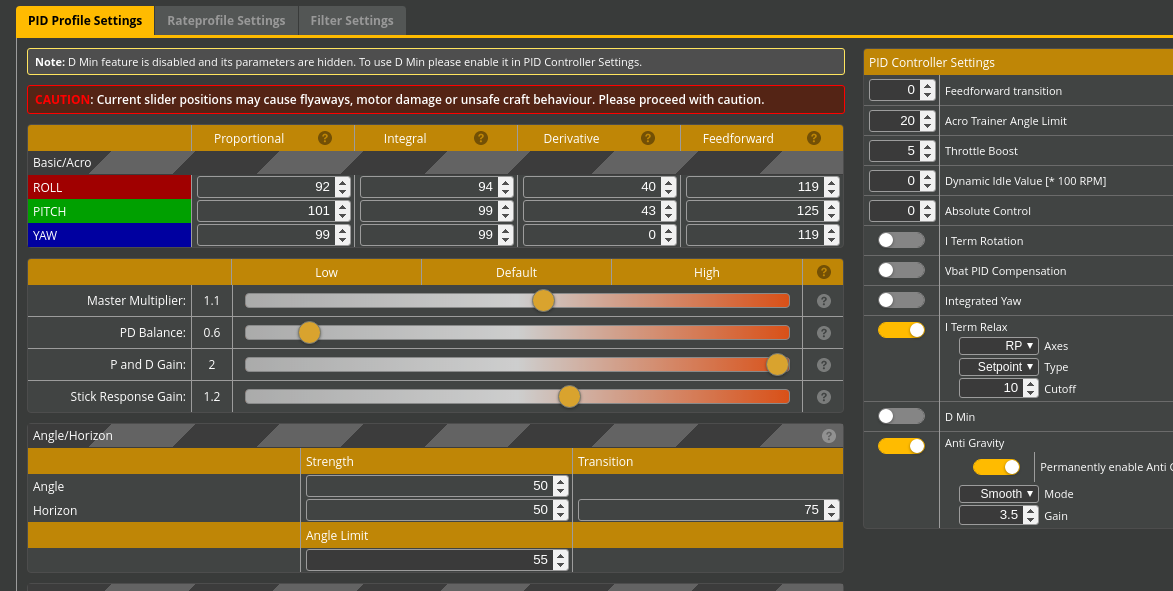
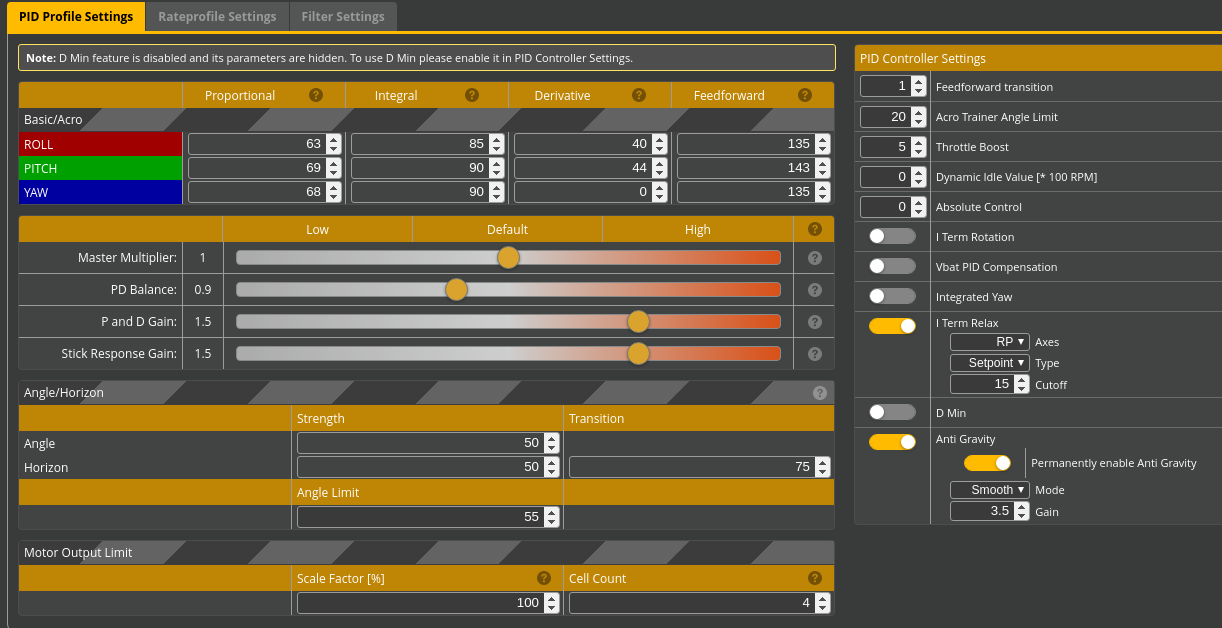
¶ PIDS
¶ 2021-06-11
¶ OLD
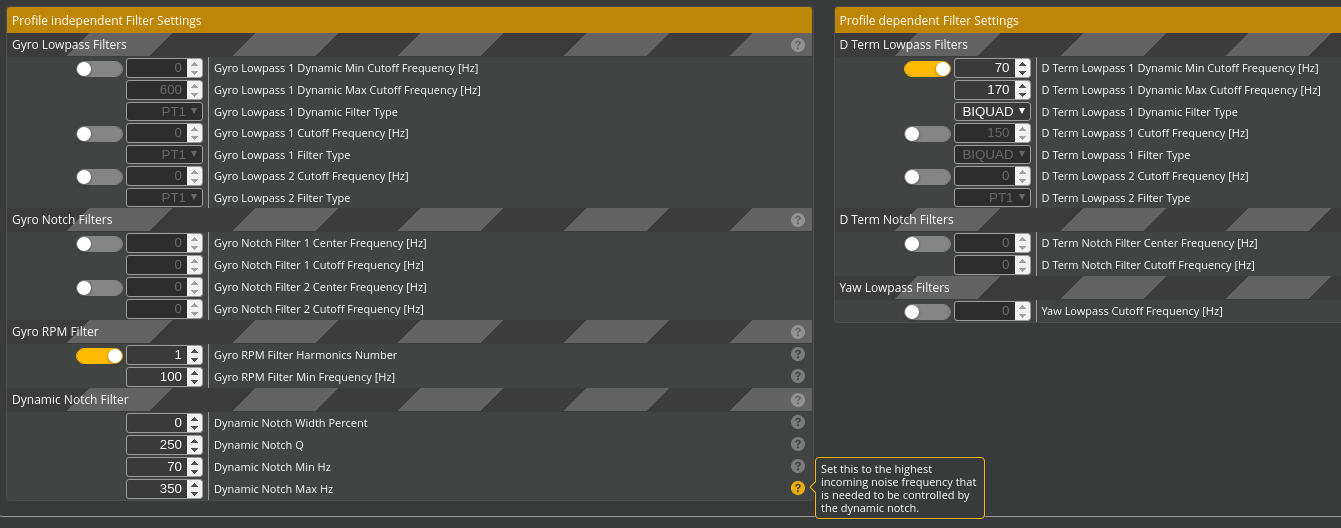
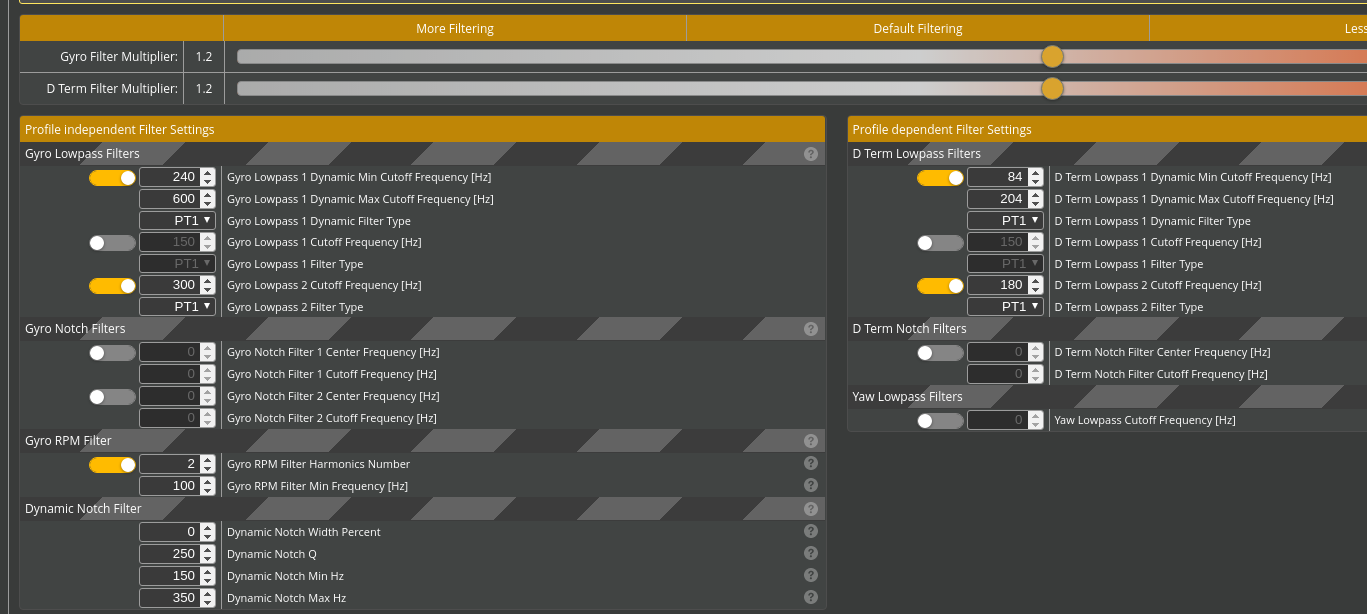
¶ Filters
¶ 2021-06-11
¶ OLD
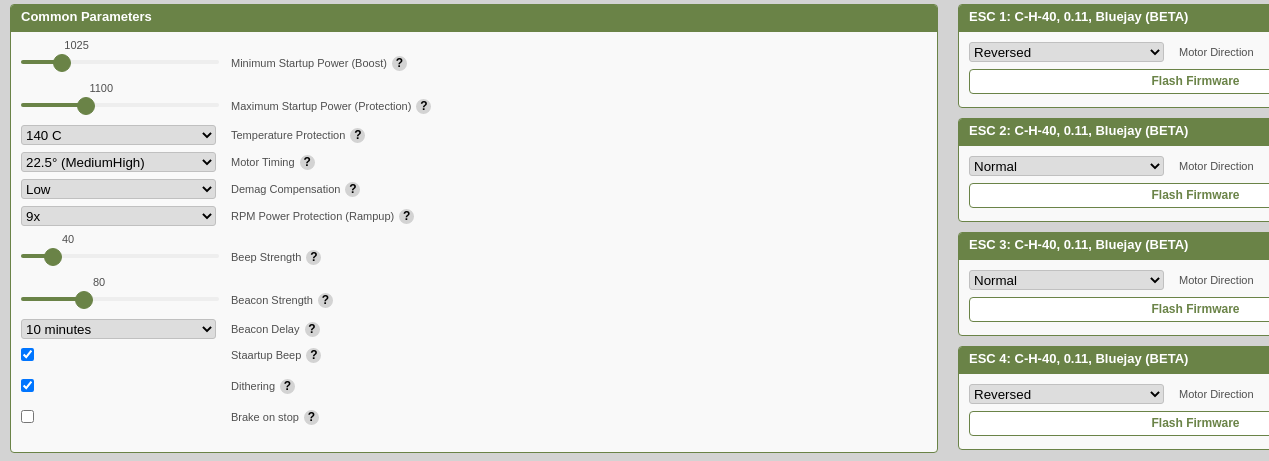
¶ BlueJay Config
¶ Diff all
¶ 2022-03-22
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.3.0 Feb 1 2022 / 20:13:01 (3267f0417) MSP API: 1.44
# config: manufacturer_id: DIAT, board_name: FURYF4OSD, version: acd41165, date: 2021-04-27T20:17:19Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name FURYF4OSD
manufacturer_id DIAT
mcu_id 003500335453500920373947
signature
# name: AcroCrap
# feature
feature TELEMETRY
# serial
serial 2 2048 115200 57600 0 115200
serial 5 64 115200 57600 0 115200
# beeper
beeper -ON_USB
# beacon
beacon RX_LOST
beacon RX_SET
# aux
aux 0 0 0 1750 2100 0 0
aux 1 13 1 1925 2050 0 0
aux 2 35 2 1925 2100 0 0
aux 3 36 0 900 900 0 13
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 14 20 24
vtxtable powerlabels 25 25 250
# master
set gyro_lpf1_static_hz = 0
set dyn_notch_count = 2
set dyn_notch_q = 450
set dyn_notch_min_hz = 100
set gyro_lpf1_dyn_min_hz = 0
set acc_calibration = -7,-9,-238,1
set mag_hardware = NONE
set baro_hardware = NONE
set rc_smoothing_auto_factor = 120
set serialrx_provider = CRSF
set dshot_idle_value = 300
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set ibata_scale = 12640
set yaw_motors_reversed = ON
set small_angle = 180
set pid_process_denom = 2
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_warn_rssi_dbm = ON
set osd_rssi_dbm_alarm = -100
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 14357
set osd_rssi_dbm_pos = 14389
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2052
set osd_throttle_pos = 2422
set osd_vtx_channel_pos = 2058
set osd_current_pos = 2401
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_battery_usage_pos = 449
set osd_disarmed_pos = 2282
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set vtx_band = 5
set vtx_channel = 8
set vtx_power = 3
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vtx_freq = 5917
set vcd_video_system = NTSC
set gyro_1_align_yaw = 1800
set rpm_filter_q = 450
set rpm_filter_min_hz = 80
set rpm_filter_fade_range_hz = 60
set name = AcroCrap
profile 0
# profile 0
set iterm_relax_cutoff = 25
set p_pitch = 44
set i_pitch = 79
set d_pitch = 41
set f_pitch = 131
set p_roll = 42
set i_roll = 76
set d_roll = 35
set f_roll = 125
set p_yaw = 42
set i_yaw = 76
set f_yaw = 125
set d_min_roll = 25
set d_min_pitch = 28
set d_max_advance = 0
set feedforward_averaging = 2_POINT
set feedforward_smooth_factor = 65
set feedforward_jitter_factor = 5
set feedforward_boost = 18
set feedforward_max_rate_limit = 95
set dyn_idle_min_rpm = 35
set dyn_idle_p_gain = 40
set simplified_d_gain = 85
set simplified_pi_gain = 95
set simplified_dmax_gain = 120
set simplified_feedforward_gain = 105
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
set tpa_breakpoint = 1750
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
¶ 2022-01-21
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.3.0 Jan 9 2022 / 11:40:24 (ee8560af4) MSP API: 1.44
# config: manufacturer_id: DIAT, board_name: FURYF4OSD, version: acd41165, date: 2021-04-27T20:17:19Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name FURYF4OSD
manufacturer_id DIAT
mcu_id 003500335453500920373947
signature
# name: AcroCrap
# feature
feature TELEMETRY
# serial
serial 2 2048 115200 57600 0 115200
serial 5 64 115200 57600 0 115200
# beeper
beeper -ON_USB
# beacon
beacon RX_LOST
beacon RX_SET
# aux
aux 0 0 0 1750 2100 0 0
aux 1 13 1 1925 2050 0 0
aux 2 35 2 1925 2100 0 0
aux 3 36 0 900 900 0 13
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 13 20 26
vtxtable powerlabels 25 100 400
# master
set gyro_lpf1_static_hz = 0
set dyn_notch_count = 2
set dyn_notch_q = 450
set dyn_notch_min_hz = 100
set gyro_lpf1_dyn_min_hz = 0
set acc_calibration = -59,51,-178,1
set serialrx_provider = CRSF
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set ibata_scale = 183
set yaw_motors_reversed = ON
set small_angle = 180
set pid_process_denom = 2
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_warn_rssi_dbm = ON
set osd_rssi_dbm_alarm = -100
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 14357
set osd_rssi_dbm_pos = 14389
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2052
set osd_throttle_pos = 2422
set osd_vtx_channel_pos = 2058
set osd_current_pos = 2401
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_battery_usage_pos = 449
set osd_disarmed_pos = 2282
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set vtx_band = 5
set vtx_channel = 8
set vtx_power = 3
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vtx_freq = 5917
set gyro_1_align_yaw = 1800
set name = AcroCrap
profile 0
# profile 0
set dterm_lpf1_dyn_min_hz = 105
set dterm_lpf1_dyn_max_hz = 210
set dterm_lpf1_static_hz = 105
set dterm_lpf2_static_hz = 210
set anti_gravity_gain = 8000
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set yaw_lowpass_hz = 0
set p_pitch = 80
set i_pitch = 143
set d_pitch = 57
set f_pitch = 252
set p_roll = 66
set i_roll = 118
set f_roll = 210
set p_yaw = 66
set i_yaw = 118
set f_yaw = 210
set d_min_roll = 40
set d_min_pitch = 57
set thrust_linear = 20
set feedforward_averaging = 3_POINT
set feedforward_smooth_factor = 70
set simplified_master_multiplier = 135
set simplified_pi_gain = 110
set simplified_dmax_gain = 0
set simplified_feedforward_gain = 130
set simplified_pitch_d_gain = 125
set simplified_pitch_pi_gain = 115
set simplified_dterm_filter_multiplier = 140
profile 1
# profile 1
set anti_gravity_gain = 8000
set p_pitch = 80
set i_pitch = 143
set d_pitch = 57
set f_pitch = 252
set p_roll = 66
set i_roll = 118
set f_roll = 210
set p_yaw = 66
set i_yaw = 118
set f_yaw = 210
set d_min_roll = 40
set d_min_pitch = 57
set feedforward_averaging = 3_POINT
set feedforward_smooth_factor = 70
set simplified_master_multiplier = 135
set simplified_pi_gain = 110
set simplified_dmax_gain = 0
set simplified_feedforward_gain = 130
set simplified_pitch_d_gain = 125
set simplified_pitch_pi_gain = 115
profile 2
# restore original profile selection
profile 1
rateprofile 0
# rateprofile 0
set roll_rc_rate = 1
set pitch_rc_rate = 1
set yaw_rc_rate = 1
set roll_expo = 55
set pitch_expo = 55
set yaw_expo = 55
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
rateprofile 1
# rateprofile 1
set roll_rc_rate = 15
set pitch_rc_rate = 15
set yaw_rc_rate = 20
set roll_expo = 76
set pitch_expo = 76
set yaw_expo = 64
set roll_srate = 91
set pitch_srate = 91
set yaw_srate = 80
rateprofile 2
# rateprofile 2
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 2
# save configuration
save
#
¶ 2021-10-18
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.2.9 Apr 27 2021 / 19:33:01 (e097f4ab7) MSP API: 1.43
# config: manufacturer_id: DIAT, board_name: FURYF4OSD, version: acd41165, date: 2021-04-27T20:17:19Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name FURYF4OSD
manufacturer_id DIAT
mcu_id 003500335453500920373947
signature
# name: AcroCrap
# timer
timer B01 AF1
# pin B01: TIM1 CH3N (AF1)
# dma
dma pin B01 0
# pin B01: DMA2 Stream 6 Channel 0
# feature
feature TELEMETRY
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 2 2048 115200 57600 0 115200
serial 5 64 115200 57600 0 115200
# aux
aux 0 0 0 1750 2100 0 0
aux 1 13 1 1925 2050 0 0
aux 2 35 2 1925 2100 0 0
aux 3 36 0 900 900 0 13
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 13 20 26
vtxtable powerlabels 25 100 400
# master
set gyro_lowpass2_hz = 375
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_min_hz = 100
set dyn_notch_max_hz = 400
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 750
set acc_calibration = -136,7,-244,1
set mag_bustype = SPI
set mag_i2c_address = 0
set mag_hardware = NONE
set baro_bustype = SPI
set baro_i2c_device = 0
set baro_hardware = NONE
set min_check = 1020
set max_check = 1980
set rssi_src_frame_errors = ON
set serialrx_provider = CRSF
set blackbox_p_ratio = 64
set dshot_idle_value = 300
set dshot_bidir = ON
set motor_poles = 12
set bat_capacity = 849
set vbat_max_cell_voltage = 450
set vbat_min_cell_voltage = 320
set ibata_scale = 16000
set beeper_dshot_beacon_tone = 3
set yaw_motors_reversed = ON
set small_angle = 180
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_warn_rssi_dbm = ON
set osd_rssi_dbm_alarm = -100
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 14357
set osd_rssi_dbm_pos = 14389
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2052
set osd_throttle_pos = 2422
set osd_vtx_channel_pos = 2058
set osd_current_pos = 2401
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_battery_usage_pos = 449
set osd_disarmed_pos = 2282
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set debug_mode = GYRO_SCALED
set vtx_band = 5
set vtx_channel = 8
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vtx_freq = 5917
set gyro_1_align_yaw = 1800
set gyro_2_spibus = 1
set name = AcroCrap
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 105
set dyn_lpf_dterm_max_hz = 255
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 225
set vbat_sag_compensation = 100
set iterm_relax_cutoff = 10
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set p_pitch = 96
set i_pitch = 99
set d_pitch = 41
set f_pitch = 136
set p_roll = 88
set i_roll = 94
set d_roll = 37
set f_roll = 129
set p_yaw = 95
set i_yaw = 99
set f_yaw = 129
set d_min_roll = 0
set d_min_pitch = 0
profile 1
# profile 1
set feedforward_transition = 100
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 10
set p_pitch = 80
set d_pitch = 80
set f_pitch = 170
set p_roll = 75
set d_roll = 75
set f_roll = 150
set f_yaw = 100
set d_min_roll = 43
set d_min_pitch = 43
set d_min_boost_gain = 15
set d_min_advance = 0
set auto_profile_cell_count = 4
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
rateprofile 1
# rateprofile 1
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
¶ 2021-06-11
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.2.9 Apr 27 2021 / 19:33:01 (e097f4ab7) MSP API: 1.43
# config: manufacturer_id: DIAT, board_name: FURYF4OSD, version: acd41165, date: 2021-04-27T20:17:19Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name FURYF4OSD
manufacturer_id DIAT
mcu_id 003500335453500920373947
signature
# name: AcroCrap
# timer
timer B01 AF1
# pin B01: TIM1 CH3N (AF1)
# dma
dma pin B01 0
# pin B01: DMA2 Stream 6 Channel 0
# feature
feature TELEMETRY
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 2 64 115200 57600 0 115200
serial 5 16384 115200 57600 0 115200
# aux
aux 0 0 0 1750 2100 0 0
aux 1 1 1 1350 1775 0 0
aux 2 13 1 1950 2000 0 0
aux 3 13 1 1825 1875 0 0
aux 4 13 1 1675 1750 0 0
aux 5 13 1 1575 1625 0 0
aux 6 13 1 1150 1225 0 0
aux 7 32 2 1925 1975 0 0
aux 8 33 2 1875 1925 0 0
aux 9 34 2 1825 1875 0 0
aux 10 35 1 1075 1325 0 0
aux 11 36 0 900 900 0 13
# master
set gyro_lowpass_hz = 0
set gyro_lowpass2_hz = 0
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_min_hz = 70
set dyn_notch_max_hz = 350
set dyn_lpf_gyro_min_hz = 0
set dyn_lpf_gyro_max_hz = 600
set acc_calibration = -104,45,-250,1
set mag_bustype = SPI
set mag_i2c_address = 0
set mag_hardware = NONE
set baro_bustype = SPI
set baro_i2c_device = 0
set baro_hardware = NONE
set min_check = 1020
set max_check = 1980
set rssi_src_frame_errors = ON
set serialrx_provider = CRSF
set dshot_idle_value = 300
set dshot_bidir = ON
set motor_poles = 12
set bat_capacity = 850
set vbat_max_cell_voltage = 450
set vbat_min_cell_voltage = 320
set ibata_scale = 183
set beeper_dshot_beacon_tone = 3
set yaw_motors_reversed = ON
set small_angle = 180
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 2101
set osd_rssi_dbm_pos = 57
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2051
set osd_throttle_pos = 374
set osd_current_pos = 2402
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_battery_usage_pos = 449
set osd_disarmed_pos = 2282
set osd_stat_tim_2 = OFF
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set debug_mode = GYRO_SCALED
set gyro_1_align_yaw = 1800
set gyro_2_spibus = 1
set gyro_rpm_notch_harmonics = 1
set name = AcroCrap
profile 0
# profile 0
set dterm_lowpass_type = BIQUAD
set dterm_lowpass2_hz = 0
set vbat_sag_compensation = 100
set iterm_relax_cutoff = 10
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set p_pitch = 101
set i_pitch = 99
set d_pitch = 43
set f_pitch = 125
set p_roll = 92
set i_roll = 94
set d_roll = 40
set f_roll = 119
set p_yaw = 99
set i_yaw = 99
set f_yaw = 119
set d_min_roll = 0
set d_min_pitch = 0
profile 1
# profile 1
set feedforward_transition = 100
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 10
set p_pitch = 80
set d_pitch = 80
set f_pitch = 170
set p_roll = 75
set d_roll = 75
set f_roll = 150
set f_yaw = 100
set d_min_roll = 43
set d_min_pitch = 43
set d_min_boost_gain = 15
set d_min_advance = 0
set auto_profile_cell_count = 4
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 67
set pitch_expo = 67
set yaw_expo = 67
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
¶ OLD
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.2.9 Apr 27 2021 / 19:33:01 (e097f4ab7) MSP API: 1.43
# config: manufacturer_id: DIAT, board_name: FURYF4OSD, version: acd41165, date: 2021-04-27T20:17:19Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name FURYF4OSD
manufacturer_id DIAT
mcu_id 003500335453500920373947
signature
# name: AcroCrap
# timer
timer B01 AF1
# pin B01: TIM1 CH3N (AF1)
# dma
dma pin B01 0
# pin B01: DMA2 Stream 6 Channel 0
# feature
feature TELEMETRY
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 2 64 115200 57600 0 115200
serial 5 16384 115200 57600 0 115200
# aux
aux 0 0 0 1750 2100 0 0
aux 1 1 1 1350 1775 0 0
aux 2 13 1 1950 2000 0 0
aux 3 13 1 1825 1875 0 0
aux 4 13 1 1675 1750 0 0
aux 5 13 1 1575 1625 0 0
aux 6 13 1 1150 1225 0 0
aux 7 32 2 1925 1975 0 0
aux 8 33 2 1875 1925 0 0
aux 9 34 2 1825 1875 0 0
aux 10 35 1 1075 1325 0 0
aux 11 36 0 900 900 0 13
# master
set gyro_lowpass_hz = 150
set gyro_lowpass2_hz = 375
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_max_hz = 350
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 750
set acc_calibration = -72,-21,-75,1
set mag_bustype = SPI
set mag_i2c_address = 0
set mag_hardware = NONE
set baro_bustype = SPI
set baro_i2c_device = 0
set baro_hardware = NONE
set min_check = 1020
set max_check = 1980
set rssi_src_frame_errors = ON
set serialrx_provider = CRSF
set blackbox_p_ratio = 64
set dshot_idle_value = 300
set dshot_bidir = ON
set motor_poles = 12
set bat_capacity = 850
set vbat_max_cell_voltage = 450
set vbat_min_cell_voltage = 320
set ibata_scale = 183
set beeper_dshot_beacon_tone = 3
set yaw_motors_reversed = ON
set small_angle = 180
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 2101
set osd_rssi_dbm_pos = 57
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2051
set osd_throttle_pos = 374
set osd_current_pos = 2402
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_battery_usage_pos = 449
set osd_disarmed_pos = 2282
set osd_stat_tim_2 = OFF
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set debug_mode = GYRO_SCALED
set gyro_1_align_yaw = 1800
set gyro_2_spibus = 1
set gyro_rpm_notch_harmonics = 1
set name = AcroCrap
profile 0
profile 1
# profile 1
set feedforward_transition = 100
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 10
set p_pitch = 80
set d_pitch = 80
set f_pitch = 170
set p_roll = 75
set d_roll = 75
set f_roll = 150
set f_yaw = 100
set d_min_roll = 43
set d_min_pitch = 43
set d_min_boost_gain = 15
set d_min_advance = 0
set auto_profile_cell_count = 4
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 67
set pitch_expo = 67
set yaw_expo = 67
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#