¶ Estado: Desactivado
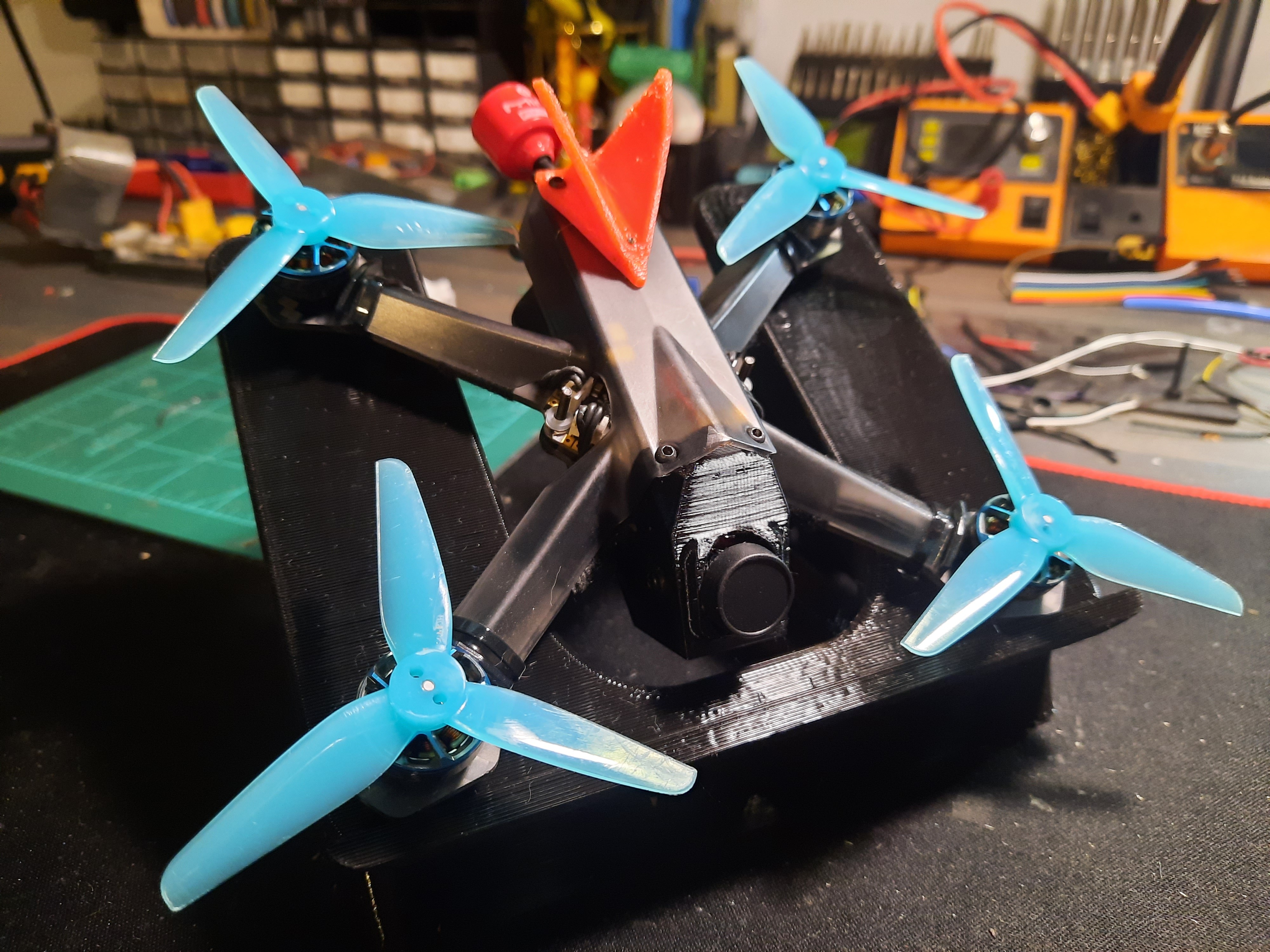
¶ Frame and Parts
- Five33 TinyTrainer
- TinyTurners 1404 4533Kv
- BetaFPV F405 20A AIO
- e7082VM - OpenVTX 500mw+
- Foxeer Predator 5 mini
- ExpressLRS HM EP1
- Five33 3018
¶ Peso
- Sin Bateria: 116gr
- Con Bateria 3s 533mah: 159gr
¶ 3D Printed Parts
Fin
Motor Guards/Gloves
Camera Canopy
Xt30 + Antenna holder
Launch Pad
¶ SW
¶ Versions
Betaflight 4.3
¶ Diff all
¶ 2022-06-27
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.3.0 Jun 14 2022 / 00:47:24 (229ac66) MSP API: 1.44
# config: manufacturer_id: BEFH, board_name: BETAFPVF405, version: d2a1f0ac, date: 2019-12-30T03:19:12Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name BETAFPVF405
manufacturer_id BEFH
mcu_id 0041002b3331471635313831
signature
# name: RedTiny
# feature
feature -LED_STRIP
feature TELEMETRY
# serial
serial 5 8192 115200 57600 0 115200
# beeper
beeper -ON_USB
# beacon
beacon RX_LOST
beacon RX_SET
# aux
aux 0 0 0 1750 2100 0 0
aux 1 13 1 1925 2050 0 0
aux 2 35 2 1925 2100 0 0
aux 3 36 0 900 900 0 13
# vtxtable
vtxtable bands 7
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable band 6 LOWRACE L CUSTOM 5333 5373 5413 5453 5493 5533 5573 5613
vtxtable band 7 IMD6 I CUSTOM 5732 5765 5828 5840 5866 5740 0 0
vtxtable powerlevels 5
vtxtable powervalues 1 2 25 100 400
vtxtable powerlabels 0 RCE 25 100 400
# master
set gyro_lpf1_static_hz = 325
set gyro_lpf2_static_hz = 650
set dyn_notch_count = 2
set dyn_notch_q = 350
set dyn_notch_min_hz = 100
set dyn_notch_max_hz = 650
set gyro_lpf1_dyn_min_hz = 325
set gyro_lpf1_dyn_max_hz = 650
set acc_calibration = -6,209,-81,1
set rc_smoothing_auto_factor = 25
set rc_smoothing_auto_factor_throttle = 25
set serialrx_provider = CRSF
set dshot_idle_value = 700
set dshot_bidir = ON
set small_angle = 180
set simplified_gyro_filter = OFF
set report_cell_voltage = ON
set telemetry_disabled_fuel = ON
set telemetry_disabled_mode = ON
set telemetry_disabled_pitch = ON
set telemetry_disabled_roll = ON
set telemetry_disabled_heading = ON
set telemetry_disabled_altitude = ON
set telemetry_disabled_lat_long = ON
set telemetry_disabled_ground_speed = ON
set osd_warn_link_quality = ON
set osd_warn_rssi_dbm = ON
set osd_rssi_dbm_alarm = -102
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 14391
set osd_link_tx_power_pos = 2064
set osd_rssi_dbm_pos = 14359
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2049
set osd_throttle_pos = 2424
set osd_vtx_channel_pos = 14342
set osd_current_pos = 385
set osd_mah_drawn_pos = 384
set osd_craft_name_pos = 2441
set osd_gps_speed_pos = 374
set osd_gps_lon_pos = 0
set osd_gps_lat_pos = 32
set osd_home_dir_pos = 78
set osd_home_dist_pos = 45
set osd_altitude_pos = 13
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2432
set osd_disarmed_pos = 2282
set osd_stat_max_spd = OFF
set osd_stat_max_dist = ON
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set osd_stat_min_rssi_dbm = ON
set vtx_power = 5
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vcd_video_system = NTSC
set rpm_filter_harmonics = 2
set rpm_filter_q = 750
set rpm_filter_min_hz = 150
set rpm_filter_fade_range_hz = 75
set name = RedTiny
profile 0
# profile 0
set dterm_lpf1_dyn_min_hz = 97
set dterm_lpf1_dyn_max_hz = 195
set dterm_lpf1_dyn_expo = 8
set dterm_lpf1_static_hz = 97
set dterm_lpf2_static_hz = 195
set vbat_sag_compensation = 100
set iterm_relax = RPY
set iterm_relax_cutoff = 33
set yaw_lowpass_hz = 125
set throttle_boost = 8
set p_pitch = 69
set i_pitch = 80
set d_pitch = 40
set f_pitch = 144
set p_roll = 63
set i_roll = 72
set d_roll = 38
set f_roll = 132
set p_yaw = 63
set i_yaw = 72
set f_yaw = 132
set d_min_roll = 28
set d_min_pitch = 29
set d_max_advance = 0
set thrust_linear = 10
set feedforward_averaging = 2_POINT
set feedforward_smooth_factor = 35
set feedforward_jitter_factor = 4
set feedforward_boost = 18
set dyn_idle_min_rpm = 28
set dyn_idle_p_gain = 42
set dyn_idle_i_gain = 42
set dyn_idle_d_gain = 42
set simplified_i_gain = 65
set simplified_d_gain = 95
set simplified_pi_gain = 140
set simplified_dmax_gain = 110
set simplified_feedforward_gain = 110
set simplified_pitch_d_gain = 90
set simplified_pitch_pi_gain = 105
set simplified_dterm_filter_multiplier = 130
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
set tpa_rate = 60
set tpa_breakpoint = 1200
rateprofile 1
# rateprofile 1
set roll_expo = 56
set pitch_expo = 56
set yaw_expo = 56
set roll_srate = 53
set pitch_srate = 53
set yaw_srate = 53
set tpa_rate = 70
set tpa_breakpoint = 1250
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
¶ 2022-06-17
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.3.0 Jun 14 2022 / 00:47:24 (229ac66) MSP API: 1.44
# config: manufacturer_id: BEFH, board_name: BETAFPVF405, version: d2a1f0ac, date: 2019-12-30T03:19:12Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name BETAFPVF405
manufacturer_id BEFH
mcu_id 0041002b3331471635313831
signature
# name: RedTiny
# feature
feature -LED_STRIP
# serial
serial 5 2048 115200 57600 0 115200
# beeper
beeper -ON_USB
# beacon
beacon RX_LOST
beacon RX_SET
# aux
aux 0 0 0 1750 2100 0 0
aux 1 13 1 1925 2050 0 0
aux 2 35 2 1925 2100 0 0
aux 3 36 0 900 900 0 13
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 13 20 26
vtxtable powerlabels 25 100 400
# master
set gyro_lpf1_static_hz = 0
set dyn_notch_count = 2
set dyn_notch_q = 500
set dyn_notch_min_hz = 200
set dyn_notch_max_hz = 700
set gyro_lpf1_dyn_min_hz = 0
set gyro_lpf1_dyn_max_hz = 0
set acc_calibration = -6,209,-81,1
set rc_smoothing_auto_factor = 25
set rc_smoothing_auto_factor_throttle = 25
set serialrx_provider = CRSF
set dshot_idle_value = 700
set dshot_bidir = ON
set small_angle = 180
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_warn_rssi_dbm = ON
set osd_rssi_dbm_alarm = -101
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 14391
set osd_link_tx_power_pos = 2064
set osd_rssi_dbm_pos = 14359
set osd_tim_2_pos = 2550
set osd_flymode_pos = 2049
set osd_throttle_pos = 2518
set osd_vtx_channel_pos = 14342
set osd_current_pos = 385
set osd_mah_drawn_pos = 384
set osd_craft_name_pos = 2538
set osd_gps_speed_pos = 374
set osd_gps_lon_pos = 0
set osd_gps_lat_pos = 32
set osd_home_dir_pos = 78
set osd_home_dist_pos = 45
set osd_altitude_pos = 13
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2528
set osd_disarmed_pos = 2282
set osd_stat_max_spd = OFF
set osd_stat_max_dist = ON
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set osd_stat_min_rssi_dbm = ON
set vtx_power = 3
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vcd_video_system = PAL
set rpm_filter_fade_range_hz = 100
set name = RedTiny
profile 0
# profile 0
set anti_gravity_gain = 3000
set iterm_relax_cutoff = 20
set iterm_limit = 500
set pidsum_limit_yaw = 1000
set throttle_boost = 7
set p_pitch = 42
set i_pitch = 86
set d_pitch = 50
set f_pitch = 131
set p_roll = 40
set i_roll = 82
set d_roll = 46
set f_roll = 125
set d_min_roll = 37
set d_min_pitch = 40
set feedforward_averaging = 2_POINT
set feedforward_smooth_factor = 35
set feedforward_jitter_factor = 5
set dyn_idle_min_rpm = 60
set dyn_idle_p_gain = 35
set simplified_pids_mode = RP
set simplified_i_gain = 115
set simplified_d_gain = 125
set simplified_pi_gain = 90
set simplified_dmax_gain = 70
set simplified_feedforward_gain = 105
set simplified_pitch_d_gain = 95
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
set tpa_rate = 70
set tpa_breakpoint = 1250
rateprofile 1
# rateprofile 1
set roll_expo = 56
set pitch_expo = 56
set yaw_expo = 56
set roll_srate = 53
set pitch_srate = 53
set yaw_srate = 53
set tpa_rate = 70
set tpa_breakpoint = 1250
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#