¶ RedGryphus 3
¶ Estado: Volando!
AOS 7 WalkSnail Editon
¶ Parts
Frame: AOS 7
Motores: Emax ECO II Series 2807 1300KV
FC: Skystars F405 HD2
ESC Skystars KO55A BLHeli_S
VTX: Walksnail VTX V1
Camara: Walksnail V1
Antena: Walksnail
RX: BetaFPV SuperD Full Diversity ELRS
Helices: HQ 7x3.5x 3
Beeper: Vivfly Beeper
LIPO:
- HRB 4000mAh 6s
- HackersRC 1300mAh 6s2p
- FrankenBattery 1550mAh 6s (recicladas de 4s rotas)
- Auline 3300mAh 5s (ex 6s, cagó una celda)
¶ Peso
Sin Bateria: XXX
Con Bateria: XXXX
Con Bateria y Runcam: XXX gr
¶ 3D Printed Parts
-
Camara HD
-
Antena ELRS
-
GPS mount
¶ SW
¶ Versions
INAV 7.10
BlueJay 0.19.2 RPM Filtering 24kHz
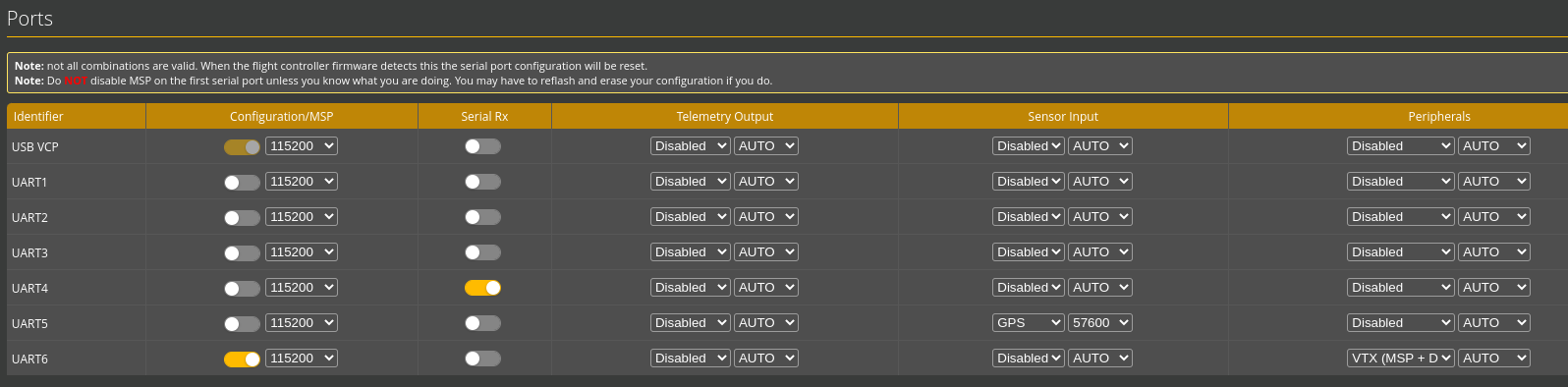
¶ Port Config
¶ Diff all
¶ 2024-04-01 - INAV 7.10
# diff all
# version
# INAV/SKYSTARSF405HD 7.1.0 Mar 27 2024 / 14:25:04 (59a6ee61)
# GCC-10.3.1 20210824 (release)
# start the command batch
batch start
# reset configuration to default settings
defaults noreboot
# resources
# Timer overrides
# Outputs [servo]
# safehome
# Fixed Wing Approach
# features
feature GPS
feature PWM_OUTPUT_ENABLE
# beeper
beeper -ON_USB
# blackbox
blackbox -NAV_ACC
blackbox NAV_POS
blackbox NAV_PID
blackbox MAG
blackbox ACC
blackbox ATTI
blackbox RC_DATA
blackbox RC_COMMAND
blackbox MOTORS
blackbox -GYRO_RAW
blackbox -PEAKS_R
blackbox -PEAKS_P
blackbox -PEAKS_Y
# Receiver: Channel map
# Ports
serial 0 0 115200 115200 0 115200
serial 3 64 115200 115200 0 115200
serial 4 2 115200 115200 0 115200
serial 5 33554432 115200 115200 0 115200
# LEDs
# LED color
# LED mode_color
# Modes [aux]
aux 0 0 0 1700 2100
aux 1 51 1 1700 2100
aux 2 11 5 1300 1700
aux 3 10 5 1700 2100
aux 4 52 6 1700 2100
aux 5 19 3 1875 2100
aux 6 42 3 1050 1300
aux 7 43 3 1300 1550
aux 8 44 3 1600 1875
aux 9 13 1 1700 2100
# Adjustments [adjrange]
# Receiver rxrange
# temp_sensor
# Mission Control Waypoints [wp]
#wp 0 invalid
# OSD [osd_layout]
osd_layout 0 0 23 0 H
osd_layout 0 1 4 15 H
osd_layout 0 7 35 0 V
osd_layout 0 8 10 19 V
osd_layout 0 9 43 14 V
osd_layout 0 11 4 16 V
osd_layout 0 12 3 17 V
osd_layout 0 13 27 1 V
osd_layout 0 14 3 1 V
osd_layout 0 15 25 0 V
osd_layout 0 22 20 1 V
osd_layout 0 23 19 0 V
osd_layout 0 28 42 15 V
osd_layout 0 30 11 8 V
osd_layout 0 31 8 1 V
osd_layout 0 32 4 15 V
osd_layout 0 97 3 0 V
osd_layout 0 110 46 4 V
osd_layout 0 112 45 5 V
osd_layout 0 142 26 19 V
osd_layout 1 1 4 15 H
osd_layout 1 3 8 6 V
osd_layout 1 4 8 6 V
osd_layout 1 7 35 0 V
osd_layout 1 8 10 19 V
osd_layout 1 9 43 14 V
osd_layout 1 11 4 16 V
osd_layout 1 12 3 17 V
osd_layout 1 13 27 1 V
osd_layout 1 14 3 1 V
osd_layout 1 15 25 0 V
osd_layout 1 22 20 1 V
osd_layout 1 23 19 0 V
osd_layout 1 28 42 15 V
osd_layout 1 30 13 6 V
osd_layout 1 31 8 1 V
osd_layout 1 32 4 15 V
osd_layout 1 97 3 0 V
osd_layout 1 110 46 4 V
osd_layout 1 112 45 5 V
osd_layout 1 142 26 19 V
osd_layout 2 1 4 15 H
osd_layout 2 7 35 0 V
osd_layout 2 8 10 19 V
osd_layout 2 9 43 14 V
osd_layout 2 11 4 16 V
osd_layout 2 12 3 17 V
osd_layout 2 13 27 1 V
osd_layout 2 14 3 1 V
osd_layout 2 15 25 0 V
osd_layout 2 22 23 1 V
osd_layout 2 23 19 0 V
osd_layout 2 28 42 15 V
osd_layout 2 30 11 8 V
osd_layout 2 31 8 1 V
osd_layout 2 32 4 15 V
osd_layout 2 43 0 0 V
osd_layout 2 97 3 0 V
osd_layout 2 110 46 4 V
osd_layout 2 112 45 5 V
osd_layout 2 142 26 19 V
# Programming: logic
# Programming: global variables
# Programming: PID controllers
# OSD: custom elements
# master
set looptime = 500
set gyro_main_lpf_hz = 90
set gyro_main_lpf_type = PT1
set dynamic_gyro_notch_q = 250
set dynamic_gyro_notch_min_hz = 60
set dynamic_gyro_notch_mode = 3D
set setpoint_kalman_q = 200
set gyro_zero_x = 2
set gyro_zero_z = -2
set ins_gravity_cmss = 978.669
set acc_hardware = BMI270
set acczero_x = -29
set acczero_y = -17
set acczero_z = 5
set accgain_x = 4090
set accgain_y = 4076
set accgain_z = 4055
set align_mag = CW270FLIP
set mag_hardware = NONE
set baro_hardware = BMP280
set serialrx_provider = CRSF
set blackbox_rate_denom = 2
set motor_pwm_protocol = DSHOT300
set failsafe_procedure = RTH
set align_board_yaw = -1800
set applied_defaults = 5
set gps_sbas_mode = AUTO
set gps_auto_baud_max_supported = 115200
set gps_ublox_use_galileo = ON
set gps_ublox_use_glonass = ON
set airmode_type = THROTTLE_THRESHOLD
set nav_auto_speed = 800
set nav_manual_speed = 1000
set nav_rth_altitude = 1500
set nav_mc_bank_angle = 45
set osd_video_system = AVATAR
set osd_time_alarm = 15
set osd_alt_alarm = 400
set osd_dist_alarm = 2000
set osd_crsf_lq_format = TYPE2
set osd_right_sidebar_scroll = ALTITUDE
set osd_failsafe_switch_layout = ON
set i2c_speed = 800KHZ
set name = REDGRYPHUS 3
set pilot_name = PELADO FPV
set tz_offset = -180
set vtx_band = 5
set vtx_channel = 8
set vtx_power = 3
set dshot_beeper_enabled = OFF
# mixer_profile
mixer_profile 1
set motor_direction_inverted = ON
set model_preview_type = 3
# Mixer: motor mixer
mmix reset
mmix 0 1.000 -1.000 -1.000 1.000
mmix 1 1.000 1.000 -1.000 -1.000
mmix 2 1.000 -1.000 1.000 -1.000
mmix 3 1.000 1.000 1.000 1.000
# Mixer: servo mixer
# mixer_profile
mixer_profile 2
# Mixer: motor mixer
# Mixer: servo mixer
# profile
profile 1
set mc_p_pitch = 49
set mc_i_pitch = 85
set mc_d_pitch = 34
set mc_p_roll = 45
set mc_i_roll = 75
set mc_d_roll = 29
set mc_p_yaw = 40
set mc_i_yaw = 80
set max_angle_inclination_rll = 450
set max_angle_inclination_pit = 450
set dterm_lpf_hz = 80
set dterm_lpf_type = PT3
set mc_iterm_relax = RPY
set d_boost_min = 0.800
set d_boost_max = 1.200
set antigravity_gain = 2.000
set antigravity_accelerator = 5.000
set smith_predictor_delay = 1.500
set tpa_rate = 20
set tpa_breakpoint = 1200
set rc_expo = 75
set rc_yaw_expo = 75
set roll_rate = 85
set pitch_rate = 85
set yaw_rate = 85
set ez_filter_hz = 90
# profile
profile 2
# profile
profile 3
# battery_profile
battery_profile 1
set throttle_idle = 5.000
# battery_profile
battery_profile 2
# battery_profile
battery_profile 3
# restore original profile selection
mixer_profile 1
profile 1
battery_profile 1
# save configuration
save
#
¶ 2024-04-01 - BF 4.5
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.5.0 Mar 19 2024 / 17:19:52 (3aabaf365) MSP API: 1.46
# config rev: d9b4858
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name SKYSTARSF405
manufacturer_id SKST
mcu_id 004600335333500520323530
signature
# name: RedGryphus 3
# feature
feature GPS
feature TELEMETRY
feature OSD
# serial
serial 3 64 115200 57600 0 115200
serial 4 2 115200 57600 0 115200
serial 5 131073 115200 57600 0 115200
# beeper
beeper -ON_USB
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 5 1300 1700 0 0
aux 2 46 5 1700 2100 0 0
aux 3 13 1 1700 2100 0 0
aux 4 35 6 1700 2100 0 0
aux 5 36 0 900 900 0 13
# rxfail
rxfail 3 s 1200
rxfail 9 s 1500
# master
set gyro_lpf1_static_hz = 0
set gyro_lpf2_static_hz = 1000
set dyn_notch_count = 1
set dyn_notch_q = 500
set dyn_notch_min_hz = 150
set gyro_lpf1_dyn_min_hz = 0
set gyro_lpf1_dyn_max_hz = 0
set acc_lpf_hz = 10
set acc_calibration = 10,-20,12,1
set rc_smoothing_auto_factor = 175
set rc_smoothing_auto_factor_throttle = 100
set rc_smoothing_setpoint_cutoff = 12
set rc_smoothing_feedforward_cutoff = 12
set rc_smoothing_throttle_cutoff = 20
set dshot_idle_value = 300
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_output_reordering = 2,0,3,1,4,5,6,7
set failsafe_delay = 5
set failsafe_procedure = GPS-RESCUE
set align_board_yaw = 180
set vbat_max_cell_voltage = 450
set vbat_min_cell_voltage = 320
set yaw_motors_reversed = ON
set small_angle = 180
set gps_sbas_mode = AUTO
set gps_ublox_use_galileo = ON
set gps_set_home_point_once = ON
set gps_rescue_ground_speed = 900
set gps_rescue_throttle_hover = 1269
set gps_rescue_min_sats = 6
set simplified_gyro_filter = OFF
set report_cell_voltage = ON
set osd_vbat_pos = 257
set osd_rssi_pos = 3278
set osd_link_quality_pos = 3214
set osd_link_tx_power_pos = 3246
set osd_rssi_dbm_pos = 3310
set osd_tim_1_pos = 353
set osd_tim_2_pos = 3598
set osd_flymode_pos = 3086
set osd_throttle_pos = 3566
set osd_vtx_channel_pos = 19
set osd_current_pos = 2529
set osd_mah_drawn_pos = 2594
set osd_craft_name_pos = 2648
set osd_pilot_name_pos = 2635
set osd_gps_speed_pos = 2073
set osd_gps_lon_pos = 33
set osd_gps_lat_pos = 51200
set osd_gps_sats_pos = 2080
set osd_home_dir_pos = 2163
set osd_home_dist_pos = 2067
set osd_flight_dist_pos = 2099
set osd_altitude_pos = 2105
set osd_warnings_pos = 14716
set osd_avg_cell_voltage_pos = 2498
set osd_disarmed_pos = 2414
set osd_flip_arrow_pos = 65
set osd_core_temp_pos = 248
set osd_log_status_pos = 97
set osd_gps_sats_show_hdop = ON
set craft_name = RedGryphus 3
set pilot_name = PeladoFPV
profile 0
# profile 0
set dterm_lpf1_dyn_max_hz = 100
set dterm_lpf2_static_hz = 0
set vbat_sag_compensation = 100
set p_pitch = 53
set i_pitch = 95
set d_pitch = 55
set f_pitch = 185
set p_roll = 53
set i_roll = 95
set d_roll = 47
set f_roll = 187
set p_yaw = 53
set i_yaw = 95
set f_yaw = 187
set horizon_level_strength = 50
set d_min_roll = 35
set d_min_pitch = 40
set d_max_advance = 0
set feedforward_smooth_factor = 35
set feedforward_jitter_factor = 12
set feedforward_max_rate_limit = 95
set dyn_idle_min_rpm = 20
set dyn_idle_p_gain = 40
set simplified_master_multiplier = 120
set simplified_feedforward_gain = 130
set simplified_pitch_pi_gain = 95
set simplified_dterm_filter = OFF
profile 1
profile 2
profile 3
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_expo = 15
set pitch_expo = 15
set yaw_expo = 15
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 85
rateprofile 1
rateprofile 2
rateprofile 3
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
¶ BF 4.4
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.4.1 Apr 11 2023 / 22:12:56 (e43d591b2) MSP API: 1.45
# config: YES
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name SKYSTARSF405
manufacturer_id SKST
mcu_id 004600335333500520323530
signature
# name: RedGryphus 3
# feature
feature -LED_STRIP
feature GPS
feature OSD
# serial
serial 2 0 19200 57600 0 115200
serial 3 131073 115200 57600 0 115200
serial 5 2 19200 57600 0 115200
# beeper
beeper -ON_USB
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 5 1300 1700 0 0
aux 2 46 5 1700 2100 0 0
aux 3 13 1 1700 2100 0 0
aux 4 35 6 1700 2100 0 0
aux 5 36 0 900 900 0 13
# rxfail
rxfail 3 s 1400
rxfail 9 s 1500
# master
set gyro_lpf1_static_hz = 300
set gyro_lpf2_static_hz = 600
set dyn_notch_count = 2
set dyn_notch_min_hz = 125
set dyn_notch_max_hz = 550
set gyro_lpf1_dyn_min_hz = 300
set gyro_lpf1_dyn_max_hz = 600
set acc_lpf_hz = 10
set acc_calibration = -86,105,9,1
set mag_hardware = NONE
set rc_smoothing_auto_factor = 175
set rc_smoothing_auto_factor_throttle = 100
set rc_smoothing_setpoint_cutoff = 12
set rc_smoothing_feedforward_cutoff = 12
set rc_smoothing_throttle_cutoff = 20
set dshot_idle_value = 550
set dshot_bidir = ON
set failsafe_delay = 10
set failsafe_procedure = GPS-RESCUE
set vbat_max_cell_voltage = 450
set small_angle = 180
set gps_sbas_mode = AUTO
set gps_auto_baud = ON
set gps_ublox_use_galileo = ON
set gps_set_home_point_once = ON
set gps_rescue_ground_speed = 1000
set gps_rescue_throttle_max = 1800
set gps_rescue_throttle_hover = 1400
set gps_rescue_min_sats = 6
set simplified_gyro_filter_multiplier = 120
set report_cell_voltage = ON
set osd_vbat_pos = 257
set osd_rssi_pos = 3278
set osd_link_quality_pos = 3214
set osd_link_tx_power_pos = 3246
set osd_rssi_dbm_pos = 3310
set osd_tim_1_pos = 353
set osd_tim_2_pos = 3598
set osd_flymode_pos = 3086
set osd_throttle_pos = 3566
set osd_vtx_channel_pos = 19
set osd_current_pos = 2529
set osd_mah_drawn_pos = 2594
set osd_craft_name_pos = 2648
set osd_pilot_name_pos = 2635
set osd_gps_speed_pos = 216
set osd_gps_lon_pos = 33
set osd_gps_lat_pos = 51200
set osd_gps_sats_pos = 2080
set osd_home_dir_pos = 2163
set osd_home_dist_pos = 2067
set osd_flight_dist_pos = 2099
set osd_altitude_pos = 2073
set osd_warnings_pos = 14716
set osd_avg_cell_voltage_pos = 2498
set osd_disarmed_pos = 2414
set osd_flip_arrow_pos = 65
set osd_core_temp_pos = 248
set osd_log_status_pos = 97
set osd_gps_sats_show_hdop = ON
set osd_displayport_device = MSP
set vcd_video_system = HD
set rpm_filter_harmonics = 2
set craft_name = RedGryphus 3
set pilot_name = PeladoFPV
profile 0
# profile 0
set dterm_lpf1_dyn_min_hz = 90
set dterm_lpf1_dyn_max_hz = 180
set dterm_lpf1_static_hz = 90
set dterm_lpf2_static_hz = 180
set anti_gravity_gain = 90
set iterm_relax_cutoff = 10
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set yaw_lowpass_hz = 0
set p_pitch = 59
set i_pitch = 69
set d_pitch = 72
set f_pitch = 215
set p_roll = 57
set i_roll = 66
set d_roll = 58
set f_roll = 206
set p_yaw = 57
set i_yaw = 66
set f_yaw = 206
set d_min_roll = 58
set d_min_pitch = 72
set feedforward_smooth_factor = 35
set feedforward_jitter_factor = 12
set dyn_idle_min_rpm = 35
set simplified_master_multiplier = 150
set simplified_i_gain = 65
set simplified_d_gain = 130
set simplified_pi_gain = 85
set simplified_dmax_gain = 0
set simplified_feedforward_gain = 115
set simplified_pitch_d_gain = 110
set simplified_dterm_filter_multiplier = 120
profile 1
profile 2
profile 3
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 85
rateprofile 1
rateprofile 2
rateprofile 3
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#