¶ Estado: Dead
Canibalizado para armar DarkRider
¶ Frame and Parts
Frame: iFlight XL5V5
Motores: iFlight Xing-E 2207 2750kv
FC: Mamba F405 MK2 Stack
ESC: Mamba 50A ESC
VTX: Rush Tank Ultimate II
Antena: Rush Cherry Antenna
RX: HM ExpressLRS 2-4ghz
Camara: Caddx RATEL 2.1mm Lens Camera
Helices: Ethix Candy Cane 5140
Beeper: Vivfly Beeper
¶ 3D Printed Parts
¶ SW
¶ Versions
Betaflight 4.2.9 - (8 KHz PID Loop Frequency))
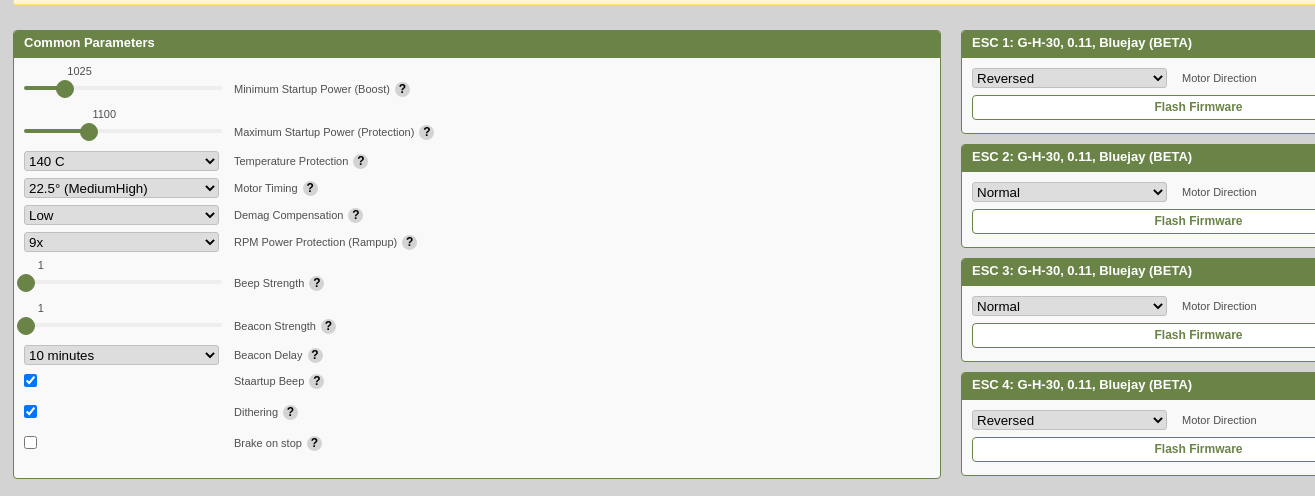
BlueJay 0.13 - 24 KHz PWM
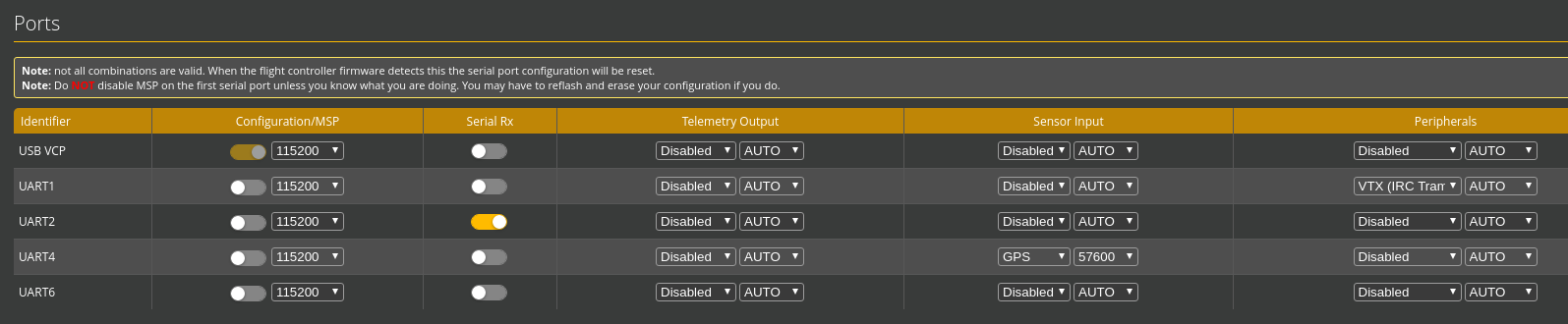
¶ Ports
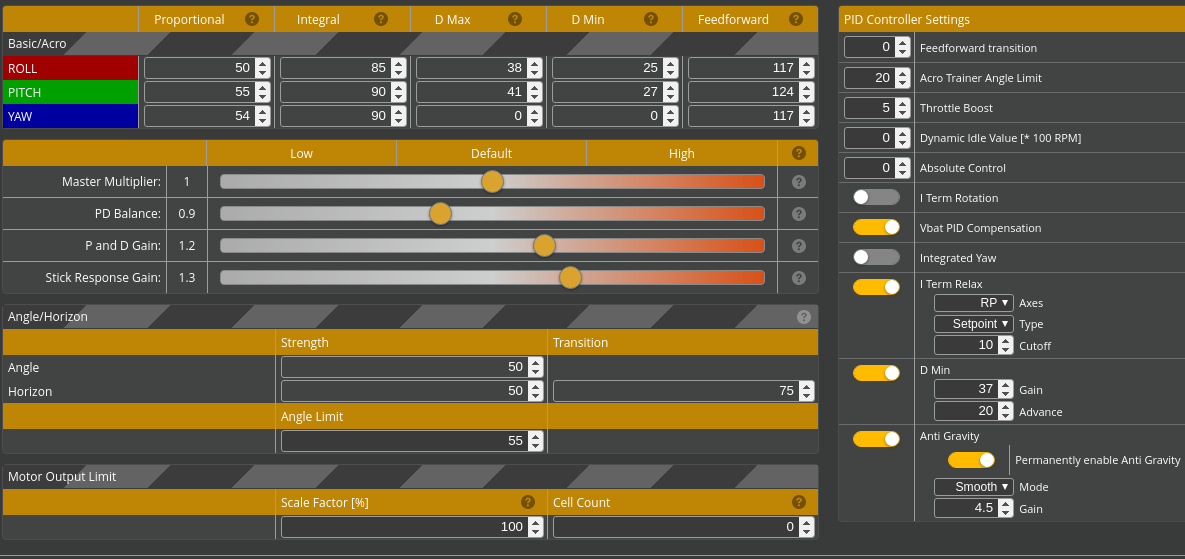
¶ PIDS
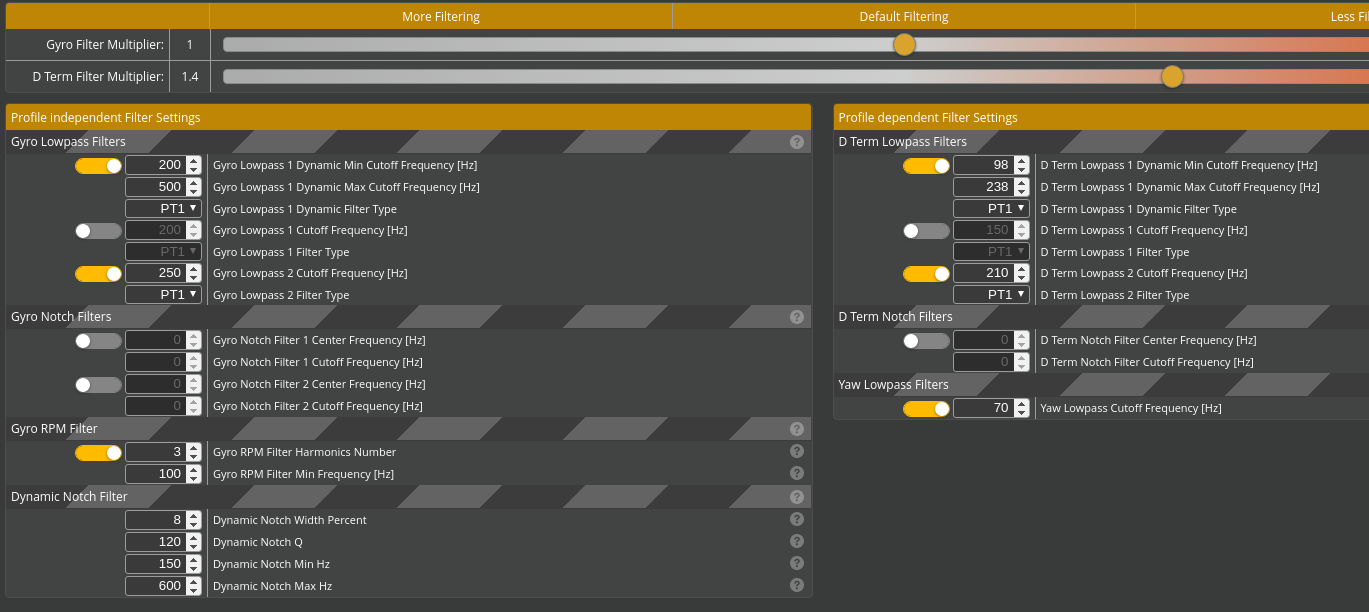
¶ Filters
¶ BlueJay Config
¶ Diff all
¶ 2021-10-18
#
# diff all
# version
# Betaflight / STM32F405 (S405) 4.2.9 Apr 27 2021 / 19:33:01 (e097f4ab7) MSP API: 1.43
# config: manufacturer_id: DIAT, board_name: FURYF4OSD, version: acd41165, date: 2021-04-27T20:17:19Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name FURYF4OSD
manufacturer_id DIAT
mcu_id 002f002a4e30500620353536
signature
# name: DarkRider
# feature
feature TELEMETRY
# serial
serial 0 2048 115200 57600 0 115200
serial 2 0 115200 57600 0 115200
serial 5 64 115200 57600 0 115200
# aux
aux 0 0 0 1700 2100 0 0
aux 1 13 1 1725 2100 0 0
aux 2 35 2 1775 2100 0 0
aux 3 36 0 900 900 0 13
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 0 5885 5905 5925 0
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 4
vtxtable powervalues 14 23 27 29
vtxtable powerlabels 25 200 500 800
# master
set acc_calibration = -53,2,-138,1
set serialrx_provider = CRSF
set dshot_bidir = ON
set bat_capacity = 1550
set vbat_max_cell_voltage = 422
set ibata_scale = 80
set yaw_motors_reversed = ON
set small_angle = 180
set gps_provider = UBLOX
set gps_sbas_mode = AUTO
set gps_auto_baud = ON
set gps_ublox_use_galileo = ON
set gps_set_home_point_once = ON
set gps_rescue_initial_alt = 20
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
set gps_rescue_min_sats = 5
set gps_rescue_min_dth = 50
set gps_rescue_allow_arming_without_fix = ON
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_warn_rssi_dbm = ON
set osd_rssi_dbm_alarm = -100
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 14389
set osd_rssi_dbm_pos = 14357
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2049
set osd_throttle_pos = 2422
set osd_vtx_channel_pos = 14346
set osd_current_pos = 2400
set osd_mah_drawn_pos = 2432
set osd_craft_name_pos = 2442
set osd_gps_speed_pos = 374
set osd_gps_lon_pos = 0
set osd_gps_lat_pos = 32
set osd_home_dir_pos = 78
set osd_home_dist_pos = 45
set osd_altitude_pos = 13
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2368
set osd_disarmed_pos = 2282
set osd_stat_max_spd = OFF
set osd_stat_max_dist = ON
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set osd_stat_min_rssi_dbm = ON
set vtx_band = 5
set vtx_channel = 8
set vtx_power = 4
set vtx_freq = 5917
set gyro_1_align_yaw = 1800
set name = DarkRider
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 98
set dyn_lpf_dterm_max_hz = 238
set dterm_lowpass2_hz = 210
set vbat_pid_gain = ON
set anti_gravity_gain = 4500
set iterm_relax_cutoff = 10
set yaw_lowpass_hz = 70
set p_pitch = 55
set d_pitch = 41
set f_pitch = 124
set p_roll = 50
set d_roll = 38
set f_roll = 117
set p_yaw = 54
set f_yaw = 117
set d_min_roll = 25
set d_min_pitch = 27
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set thr_mid = 31
set rates_type = ACTUAL
set roll_rc_rate = 1
set pitch_rc_rate = 1
set yaw_rc_rate = 1
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
¶ OLD
# version
# Betaflight / STM32F405 (S405) 4.2.8 Feb 15 2021 / 12:08:36 (101738d8e) MSP API: 1.43
# config: manufacturer_id: IFRC, board_name: IFLIGHT_SUCCEX_E_F4, version: c7fde51e, date: 2020-08-26T04:30:34Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name IFLIGHT_SUCCEX_E_F4
manufacturer_id IFRC
mcu_id 002a00235453500f20393947
signature
# name: DarkRider 1
# feature
feature -DISPLAY
feature GPS
feature AIRMODE
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 3 2 115200 57600 0 115200
# led
led 0 0,0::G:0
led 1 1,0::G:0
led 2 2,0::G:0
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 1400 1775 0 0
aux 2 46 1 1850 1950 0 0
aux 3 46 1 1600 1700 0 0
aux 4 13 1 1925 2000 0 0
aux 5 13 1 1800 1900 0 0
aux 6 13 1 1675 1725 0 0
aux 7 13 1 1150 1225 0 0
aux 8 13 1 1075 1125 0 0
aux 9 13 1 1550 1625 0 0
aux 10 35 1 900 1275 0 0
aux 11 36 0 900 900 0 13
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 0 5885 5905 5925 0
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 4
vtxtable powervalues 25 100 400 600
vtxtable powerlabels 25 100 400 800
# master
set acc_calibration = -50,-24,123,1
set min_check = 1010
set max_check = 1950
set serialrx_provider = CRSF
set blackbox_device = NONE
set dshot_idle_value = 600
set dshot_bidir = ON
set failsafe_procedure = GPS-RESCUE
set vbat_max_cell_voltage = 440
set ibata_offset = 0
set yaw_motors_reversed = ON
set small_angle = 180
set gps_provider = UBLOX
set gps_sbas_mode = WAAS
set gps_auto_baud = ON
set gps_ublox_use_galileo = ON
set gps_set_home_point_once = ON
set gps_rescue_initial_alt = 20
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
set gps_rescue_min_sats = 5
set gps_rescue_min_dth = 50
set report_cell_voltage = ON
set osd_warn_link_quality = ON
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 2100
set osd_rssi_dbm_pos = 57
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2051
set osd_throttle_pos = 2422
set osd_vtx_channel_pos = 2068
set osd_current_pos = 2402
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_gps_speed_pos = 374
set osd_gps_lon_pos = 2081
set osd_gps_lat_pos = 2113
set osd_home_dir_pos = 2126
set osd_home_dist_pos = 2093
set osd_altitude_pos = 2061
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_disarmed_pos = 2282
set osd_stat_tim_2 = OFF
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON
set system_hse_mhz = 0
set vtx_band = 3
set vtx_channel = 6
set vtx_power = 3
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vtx_freq = 5905
set gyro_1_align_yaw = 1800
set name = DarkRider 1
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 98
set dyn_lpf_dterm_max_hz = 238
set dterm_lowpass2_hz = 210
set vbat_pid_gain = ON
set anti_gravity_gain = 4500
set iterm_relax_cutoff = 10
set yaw_lowpass_hz = 70
set p_pitch = 55
set d_pitch = 41
set f_pitch = 124
set p_roll = 50
set d_roll = 38
set f_roll = 117
set p_yaw = 54
set f_yaw = 117
set d_min_roll = 25
set d_min_pitch = 27
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 67
set pitch_expo = 67
set yaw_expo = 67
set roll_srate = 85
set pitch_srate = 85
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#