¶ Configuraciones Generales
Fecha de actualizacion: 2023-12-28
¶ Rates
# rateprofile 0
set roll_expo = 15
set pitch_expo = 15
set yaw_expo = 15
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 85
¶ AUX Modes
¶ FreeStyle
# aux
aux 0 0 0 1700 2100 0 0
aux 1 13 1 1725 2100 0 0
aux 2 35 2 1775 2100 0 0
aux 3 36 0 900 900 0 13
¶ GPS
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 5 1300 1700 0 0
aux 2 46 5 1700 2100 0 0
aux 3 13 1 1700 2100 0 0
aux 4 35 6 1700 2100 0 0
aux 5 36 0 900 900 0 13
¶ OSD
¶ Walksnail BF 4.5 NoGPS
set report_cell_voltage = ON
set vcd_video_system = HD
set osd_vbat_pos = 396
set osd_rssi_pos = 3276
set osd_link_quality_pos = 3212
set osd_link_tx_power_pos = 3244
set osd_rssi_dbm_pos = 3308
set osd_tim_2_pos = 3563
set osd_flymode_pos = 20
set osd_throttle_pos = 3531
set osd_current_pos = 3594
set osd_craft_name_pos = 2631
set osd_pilot_name_pos = 2653
set osd_home_dir_pos = 47
set osd_home_dist_pos = 83
set osd_warnings_pos = 14646
set osd_avg_cell_voltage_pos = 3627
set osd_displayport_device = MSP
¶ Walksnail BF 4.5 GPS
set report_cell_voltage = ON
set vcd_video_system = HD
set osd_displayport_device = MSP
set osd_vbat_pos = 257
set osd_rssi_pos = 3278
set osd_link_quality_pos = 3214
set osd_link_tx_power_pos = 3246
set osd_rssi_dbm_pos = 3310
set osd_tim_1_pos = 353
set osd_tim_2_pos = 3598
set osd_flymode_pos = 3086
set osd_throttle_pos = 3566
set osd_vtx_channel_pos = 19
set osd_current_pos = 2529
set osd_mah_drawn_pos = 2594
set osd_craft_name_pos = 2648
set osd_pilot_name_pos = 2635
set osd_gps_speed_pos = 2073
set osd_gps_lon_pos = 33
set osd_gps_lat_pos = 51200
set osd_gps_sats_pos = 2080
set osd_home_dir_pos = 2163
set osd_home_dist_pos = 2067
set osd_flight_dist_pos = 2099
set osd_altitude_pos = 2105
set osd_warnings_pos = 14716
set osd_avg_cell_voltage_pos = 2498
set osd_disarmed_pos = 2414
set osd_flip_arrow_pos = 65
set osd_core_temp_pos = 248
set osd_log_status_pos = 97
set osd_gps_sats_show_hdop = ON
¶ Analog 4.4 No GPS
set report_cell_voltage = ON
set vcd_video_system = NTSC
set osd_link_quality_pos = 2070
set osd_link_tx_power_pos = 2102
set osd_tim_2_pos = 2360
set osd_throttle_pos = 2392
set osd_vtx_channel_pos = 2059
set osd_craft_name_pos = 2405
set osd_pilot_name_pos = 2408
set osd_warnings_pos = 14537
set osd_avg_cell_voltage_pos = 2424
set osd_canvas_height = 13
¶ Links de PID tunning/Filtros
- UAV Tech - Presents - Una primera aproximación
- Video: Simple Betaflight PID tunning
- Ronin Tunning SetUp
¶ OLD Config
¶ RATES
¶ 2023-12-28
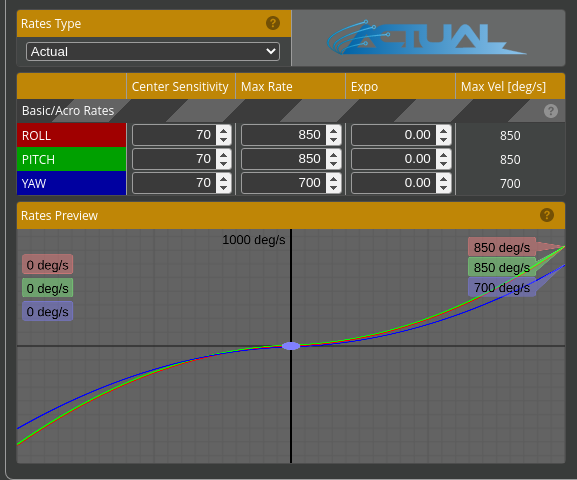
¶ Rates
# rateprofile 0
set rates_type = ACTUAL
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
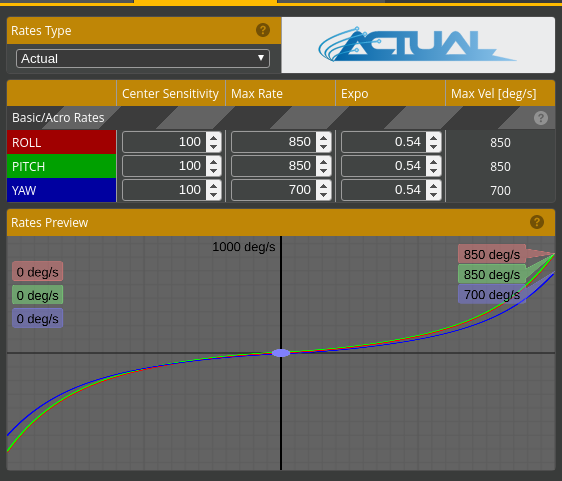
¶ 2021-12-01
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 1
set pitch_rc_rate = 1
set yaw_rc_rate = 1
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
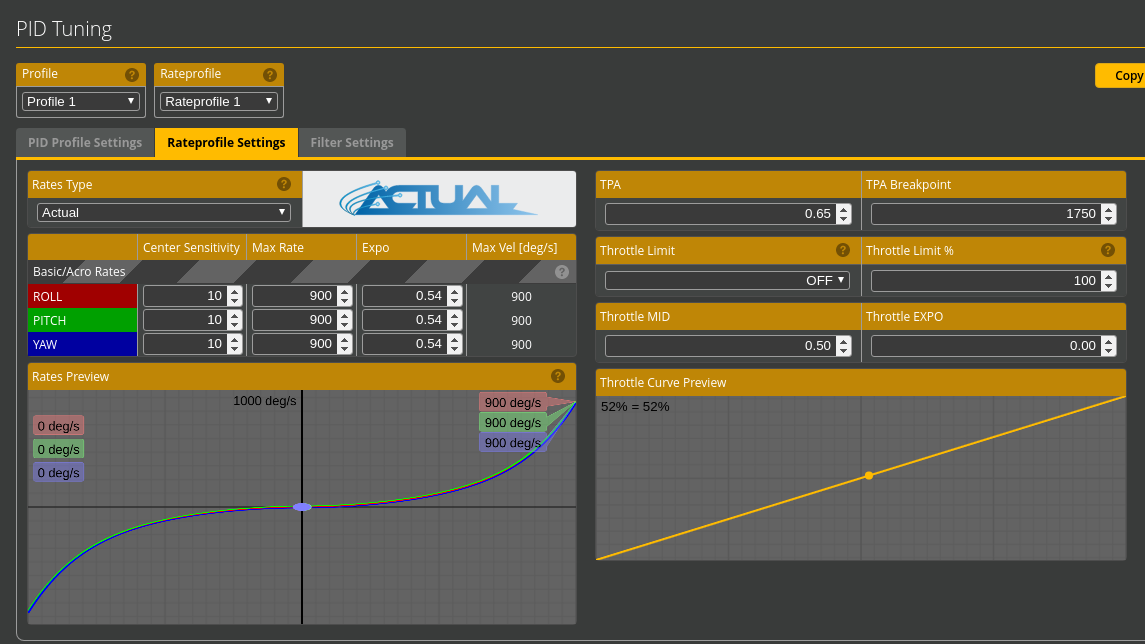
¶ 2021-06-18
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 85
set pitch_srate = 85
set tpa_breakpoint = 1750
¶ 2021-04-01
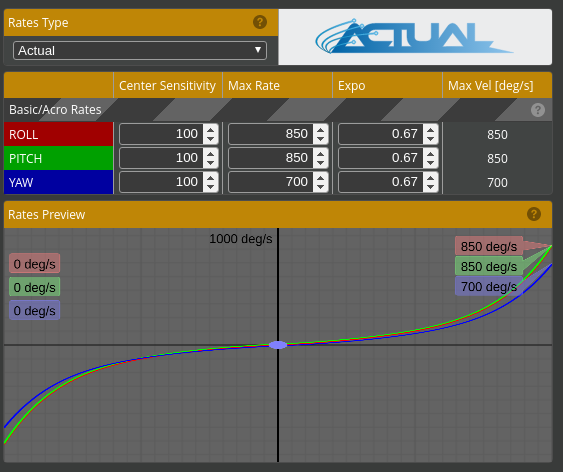
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 10
set pitch_rc_rate = 10
set yaw_rc_rate = 10
set roll_expo = 67
set pitch_expo = 67
set yaw_expo = 67
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 70
¶ 2021-03-30
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 1
set pitch_rc_rate = 1
set yaw_rc_rate = 1
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 90
set pitch_srate = 90
set yaw_srate = 90
set tpa_breakpoint = 1750
¶ AUX MODES
¶ Crossfire/Tracer
AUX 1 - ARM
AUX 2 - ACRO/ANGLE/TURTLE - BEEPER/PREARM - GPS
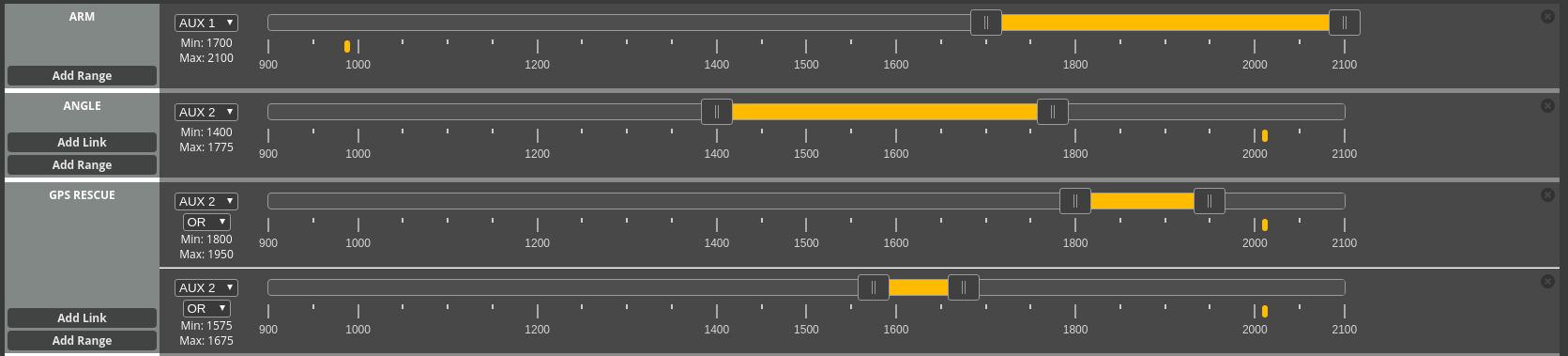
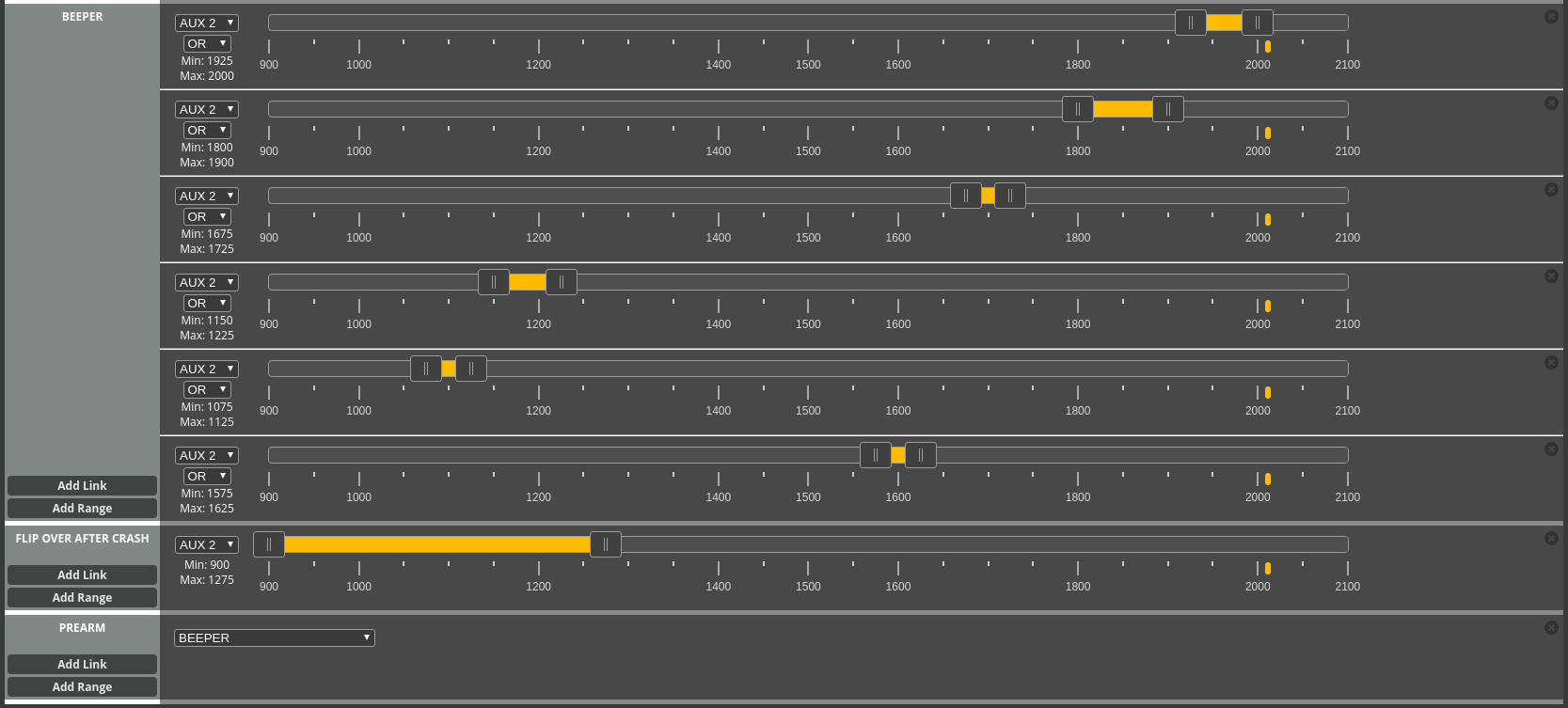
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 1400 1775 0 0
aux 2 46 1 1800 1950 0 0
aux 3 46 1 1575 1675 0 0
aux 4 13 1 1925 2000 0 0
aux 5 13 1 1800 1900 0 0
aux 6 13 1 1675 1725 0 0
aux 7 13 1 1150 1225 0 0
aux 8 13 1 1075 1125 0 0
aux 9 13 1 1575 1625 0 0
aux 10 35 1 900 1275 0 0
aux 11 36 0 900 900 0 13
¶ Generales
set report_cell_voltage = ON
¶ OSD
¶ GPS
set osd_warn_link_quality = ON
set osd_vbat_pos = 257
set osd_rssi_pos = 129
set osd_link_quality_pos = 2135
set osd_rssi_dbm_pos = 161
set osd_tim_1_pos = 353
set osd_tim_2_pos = 2519
set osd_flymode_pos = 2062
set osd_throttle_pos = 2487
set osd_vtx_channel_pos = 2067
set osd_current_pos = 2465
set osd_mah_drawn_pos = 2498
set osd_craft_name_pos = 2507
set osd_gps_speed_pos = 216
set osd_gps_lon_pos = 2081
set osd_gps_lat_pos = 2049
set osd_gps_sats_pos = 119
set osd_home_dir_pos = 2127
set osd_home_dist_pos = 2094
set osd_flight_dist_pos = 85
set osd_altitude_pos = 2099
set osd_warnings_pos = 14571
set osd_avg_cell_voltage_pos = 2434
set osd_disarmed_pos = 2411
set osd_flip_arrow_pos = 65
set osd_core_temp_pos = 248
set osd_log_status_pos = 97
set osd_stat_rtc_date_time = ON
set osd_stat_max_dist = ON
set osd_stat_endbatt = ON
set osd_stat_min_link_quality = ON
¶ No GPS
set osd_warn_link_quality = ON
set osd_vbat_pos = 374
set osd_rssi_pos = 262
set osd_link_quality_pos = 2100
set osd_rssi_dbm_pos = 57
set osd_tim_2_pos = 2454
set osd_flymode_pos = 2051
set osd_throttle_pos = 2422
set osd_current_pos = 2402
set osd_mah_drawn_pos = 2434
set osd_craft_name_pos = 2442
set osd_warnings_pos = 14602
set osd_avg_cell_voltage_pos = 2370
set osd_disarmed_pos = 2282
set osd_stat_tim_2 = OFF
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_min_link_quality = ON
set osd_stat_total_time = ON